
پروژه پارک خودکار خودرو با شبکه های عصبی در متلب
پارک خودکار خودرو با استفاده از شبکه های عصبی ، در این پست از وب سایت مطلب دی ال پروژه ای تحت عنوان پروژه پارک خودکار خودرو با شبکه های عصبی در متلب (پارک اتومبیل با MLP و RBF) را برای دانلود قرار داده ایم.
پروژه پارک خودکار خودرو با شبکه های عصبی در نرم افزار متلب
امروزه پارک خودکار خودروها یکی از آپشن های مهم خودروهای لوکس و پیشرفته محسوب می شود که برای ماشین های سبک و حتی سنگین در نظر گرفته شده است. در این پروژه قصد داریم تا با استفاده از شبکه های عصبی مدلی را برای حل معادلات دینامیکی ساده یک خودرو را حل کنیم و خودرو را در محل از پیش تعیین شده پارک نماییم. برای این کار مراحل زیر را طی کرده ایم:
- شبیه سازی معادلات دینامیکی ربات
- آماده سازی داده های آموزش
- آموزش شبکه عصبی
- تست شبکه با استفاده از داده های آموزش
- وارد کردن x و φ برای پارک خودکار
شبیه سازی معادلات دینامیکی ربات
معادلات دینامیکی اتومبیل
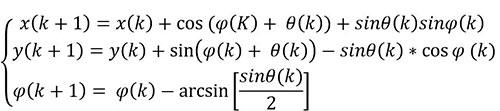
معادلات دینامیکی فوق در نرم افزار متلب پیاده شده اند.
در نظر داشته باشید زاویه فرمان یا θ محدودیت دارد:
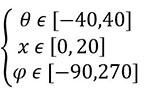
هدف دادن فرمان های متوالی θ به ازای شرایط اولیه مختلف جهت رسیدن به موقعیت x = 10 و φ = ۹۰ .
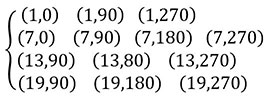
پیشنهاد برای جفت x و φ
پارک به ازای حالات زیر انجام می شود:
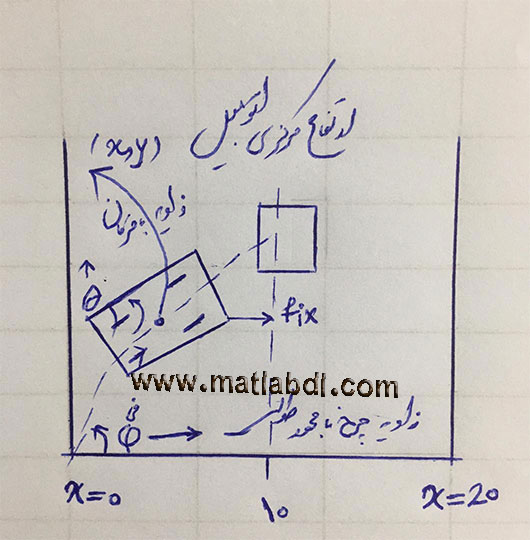
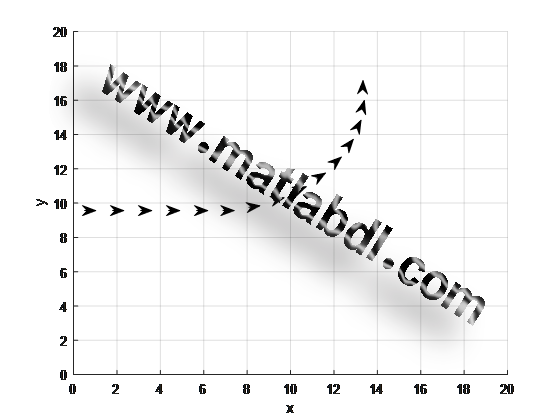
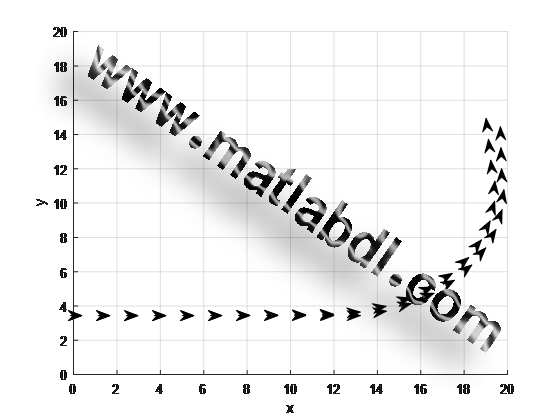
شکل زیر نمایشگر خودرو و جهت فلش زاویه پارک یعنی φ را نشان می دهد.
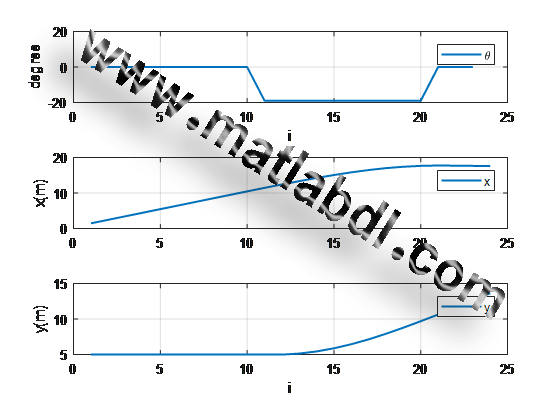
شکل زیر نیز مقادیر x ، y و θ را نشان می دهد.

همچنین بخوانید: تشخیص پلاک خودرو با نرم افزار متلب در حالت صاف نبودن پلاک
آماده سازی داده های آموزش
برای بدست آوردن داده های آموزش لازم بود که یک بار سیستم و پارک خودرو را در مسیر رفت شبیه سازی کنیم. برای نقطه مشخص، ![]() سیستم را شبیه سازی کرده ایم. با سعی و خطا مقدار θ های لازم بدست آمده اند.
سیستم را شبیه سازی کرده ایم. با سعی و خطا مقدار θ های لازم بدست آمده اند.
مقادیر θ و x در بازه ی تعیین شده و مجاز قرار دارند.تصاویر مربوطه در داکیومنت پروژه قرار دارد.
آموزش شبکه عصبی
برای آموزش شبکه عصبی ، از تولباکس های قدرتمند نرم افزار متلب استفاده کرده ایم.تصویر ساختار پیشنهادی برای شبکه MLP در داکیومنت پروژه قرار دارد.این شبکه از ۲ لایه تشکیل شده است که شامل لایه پنهان با ۲۰ نورون و لایه ی خروجی با ۱ نورون می شود. از سه ورودی [x,y,φ] برای تخمین θ استفاده کرده ایم.
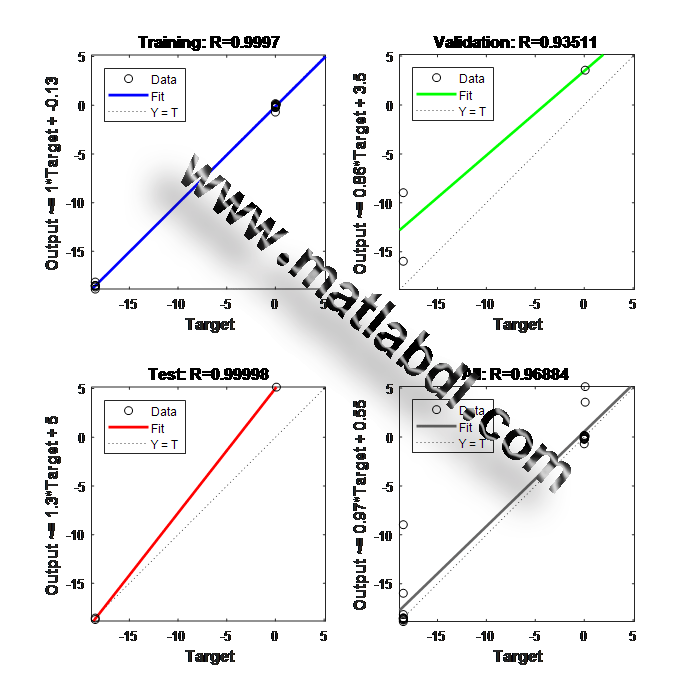
با استفاده از الگوریتم Levenberg-Marquardt ضرایب شبکه عصبی را به روز رسانی کرده ابم. پس از آموزش، نمودار رگرسیون برای داده های مختلف به صورت زیر حاصل می شود. در نمودار رگرسیون هرچه خط به شیب واحد نزدیک تر باشد نتیجه مطلوب تر است. زیرا نشان می دهد که تخمین شبکه عصبی از داده های واقعی صحیح تر است.جدول پارامترهای شبکه ای عصبی در داکیومنت پروژه موجود می باشد.
تست شبکه با استفاده از داده های آموزش
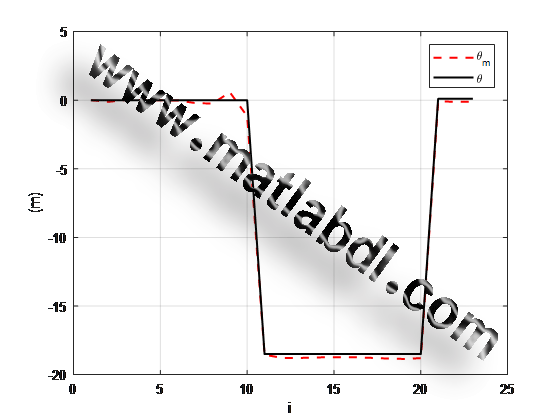
برای تست کردن شبکه عصبی ، مسیر لازم را به شبکه عصبی داده و مقدار فرمان یعنی![]() θ را بدست آورده ایم.
θ را بدست آورده ایم.
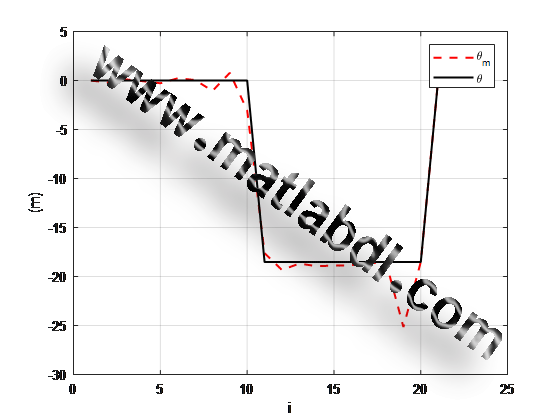
برای نقطه ای دیگر نیز می همین کارها را تکرار کرده ایم، همینطور مجددا تمام کارهای بالا را برای شبکه RBF انجام داده ایم.(خروجی ها در فایل پروژه موجود می باشد).
وارد کردن x و φ برای پارک خودکار
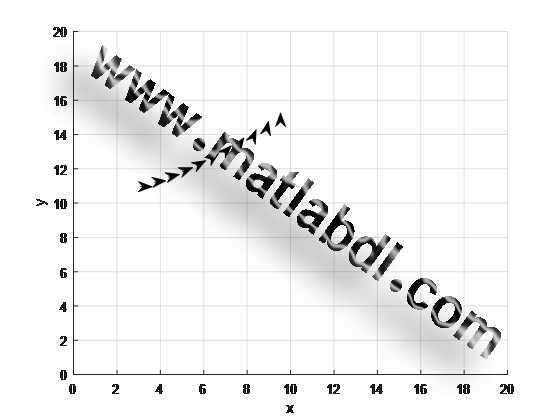
از طریق الگوریتم درونیابی Spline ابتدا مسیر بین نقطه ابتدایی و انتهایی را حدس زده ایم و سپس از طریق شبکه عصبی مسیر را طی کرده ایم:
با اجرا کردن کد مربوطه در فایل پروژه از ما φ و x نهایی را از ما میگیرد و نمودار حرکت را رسم می کند.
Enter the x end (0 to 10) = 10
Enter the phi (0 to 360) = 90
نتیجه گیری پروژه پارک خودکار اتومبیل با شبکه های عصبی در نرم افزار متلب
در این پروژه معادلات دینامیکی خودرو را شبیه سازی کردیم و به وسیله ی داده های آن، شبکه های MLP و RBF را آموزش دادیم تا با دریافت مسیر حرکت مقدار فرمان لازم یعنی θ را تولید نمایند.برای بهتر شدن نتایج می توان از تعداد و تکرار بیشتری از مجموعه داده ها استفاده کرد.
همچنین بخوانید: تشخیص و شمارش خودروها در یک ویدئو با متلب
کارشناسان وب سایت MATLABDL قادر به انجام پروژه با موضوعات مشابه و در زمینه شبکه های عصبی و … می باشند.
قیمت پروژه: ۱۴۹۰۰۰ تومان
حجم : ۱/۰۲ مگابایت
توضیحات : پیاده سازی در نرم افزار متلب انجام شده است.
کلمات کلیدی: پروژه پارک خودکار خودرو,پروژه پارک خودکار اتومبیل با شبکه های عصبی,پروژه پارک خودکار اتومبیل با شبکه های عصبی در نرم افزار متلب,پروژه پارک خودکار اتومبیل در نرم افزار متلب
منبع : مطلب دی ال
رمز فایل : www.matlabdl.com









دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.